DISLO-MAN
In DISLO-MAN CEDEO develops a system to troubleshoot and apply corrective actions to production machines.
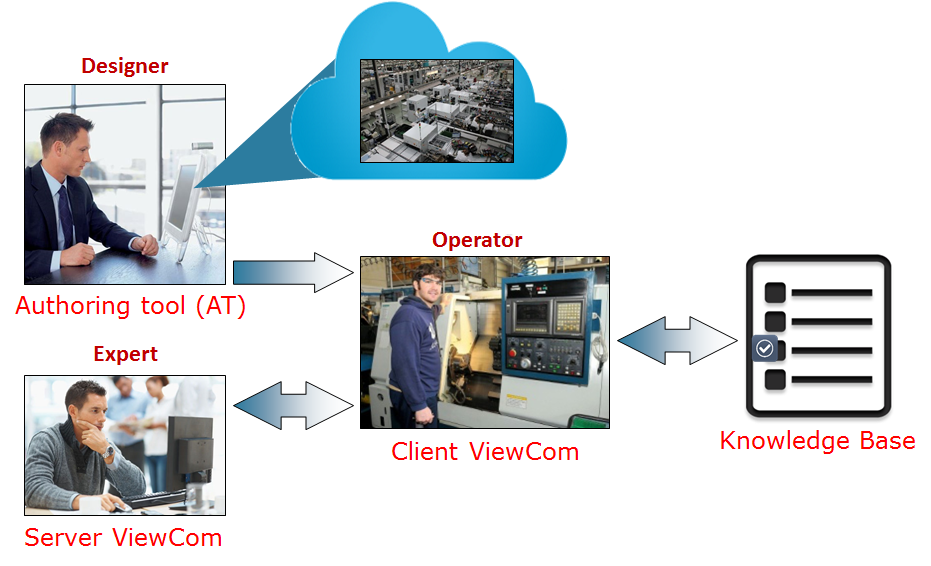
The system has 2 types of user – operator and expert – who perform the following functions:
- The operator wants to repair the production machine and has the task to
- To assess whether the problem is a known one, and then solve it by displaying real and/or augmented reality 3D scenes of the machine
- Otherwise
- To collect as much information as possible about the machine and the ambient using sensors
- To stream the information to an expert with whom he is remotely connected
- To perform actions presented by the expert on the machine using augmented reality techniques.
- The expert uses the information captured and transmitted by the operator (video, ambient data, etc.) presented on a dashboard, to show to the operator the actions to be performed using augmented reality techniques.
The augmented reality techniques used and/or developed by the project include:
- A virtual instruction manual created from an knowledge base containing solutions to known problems
- A 3D scanning system (eg Lenovo PHAB 2 Pro) to create 3D models of the machine and all the components needed for its repair
- An authoring system of augmentedreality scenes with which the designer
- Defines the behavior of the above components for fault repair (e.g. a knob that can rotate only 90° downwards);
- Creates augmented reality scenes for different fault conditions using 3D machine models and related components;
- Creates augmented reality scenes for solving known problems in order to add them to the virtual instruction manual to be delivered to the client along with the machine..
- A real time communication system that allows
- The operator to
- Acquire and transmit ambient data to the expert using an integrated kit of sensors deployed in the workshop;
- Acquire the scene with the production machine in the foreground ,using a headset s Meta or a kinect camera or a mobile device such as Lenovo PHAB 2 Pro, and other ambient data that are useful to the expert to understand the operating conditions of the machine
- Stream the scene to the expert
- The expert to
- Receive and present on his dashboard the data streamed by the operator;
- Augment the scene received from the operator with 3D graphic objects, or his hands captured by an ad hoc capture device (e.g. Leap Motion);
- Stream the digital representation of the component of the augmented scene to the operator
- The operator to mimic the actions proposte by the expert in the augmented reality scene.
- The operator to
The figure describes the scenario